Arm Manipulation
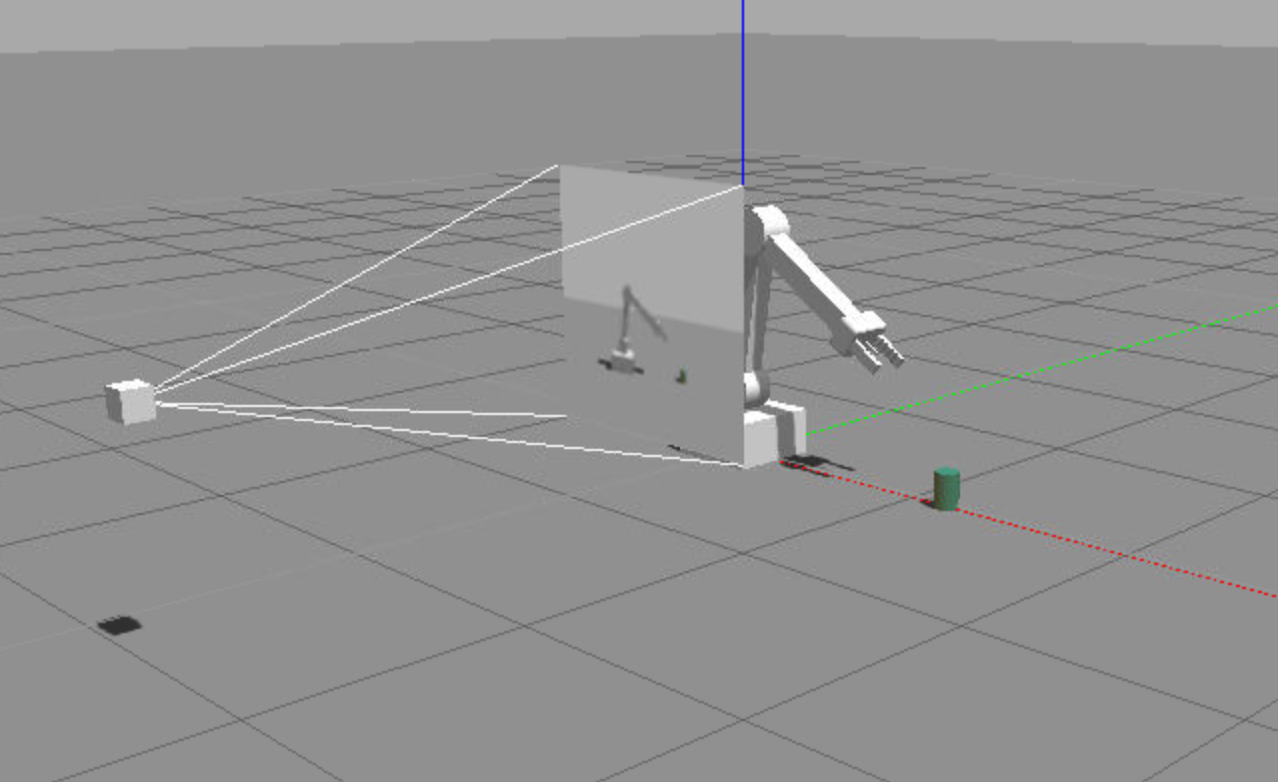
For this project, the goal is to create a DQN agent and define reward functions to teach a robotic arm to make contact with an object in front of it without hitting the ground.
Robotics M.S. Student | Software Engineer

I am currently pursuing my M.S. in Robotics at Oregon State University. My current research lies in the depths of Deep Learning and Legged Locomotion. I have a Computer Science background and previously worked as an Associate Software Engineer at NASA-JSC where I supported engineers and maintained the commmunications software in Mission Control. I am currently involved in a project with the Dynamic Robotics Laboratory here at OSU. We are working on optimizing a Deep Reinforcement Learning model to train Cassie how to walk in simulation and transfer this model to the real robot. My hope is to one day make that giant robot you see in the banner move as it was portrayed in the animated shows. Nothing excites me more than seeing something out of science fiction turn into reality.
This is a summary of what I do, if you'd like to learn more you can view my resume here.
Click the title of the project to learn more about it or take a peek at what I'm working on at my GitHub.
For this project, the goal is to create a DQN agent and define reward functions to teach a robotic arm to make contact with an object in front of it without hitting the ground.
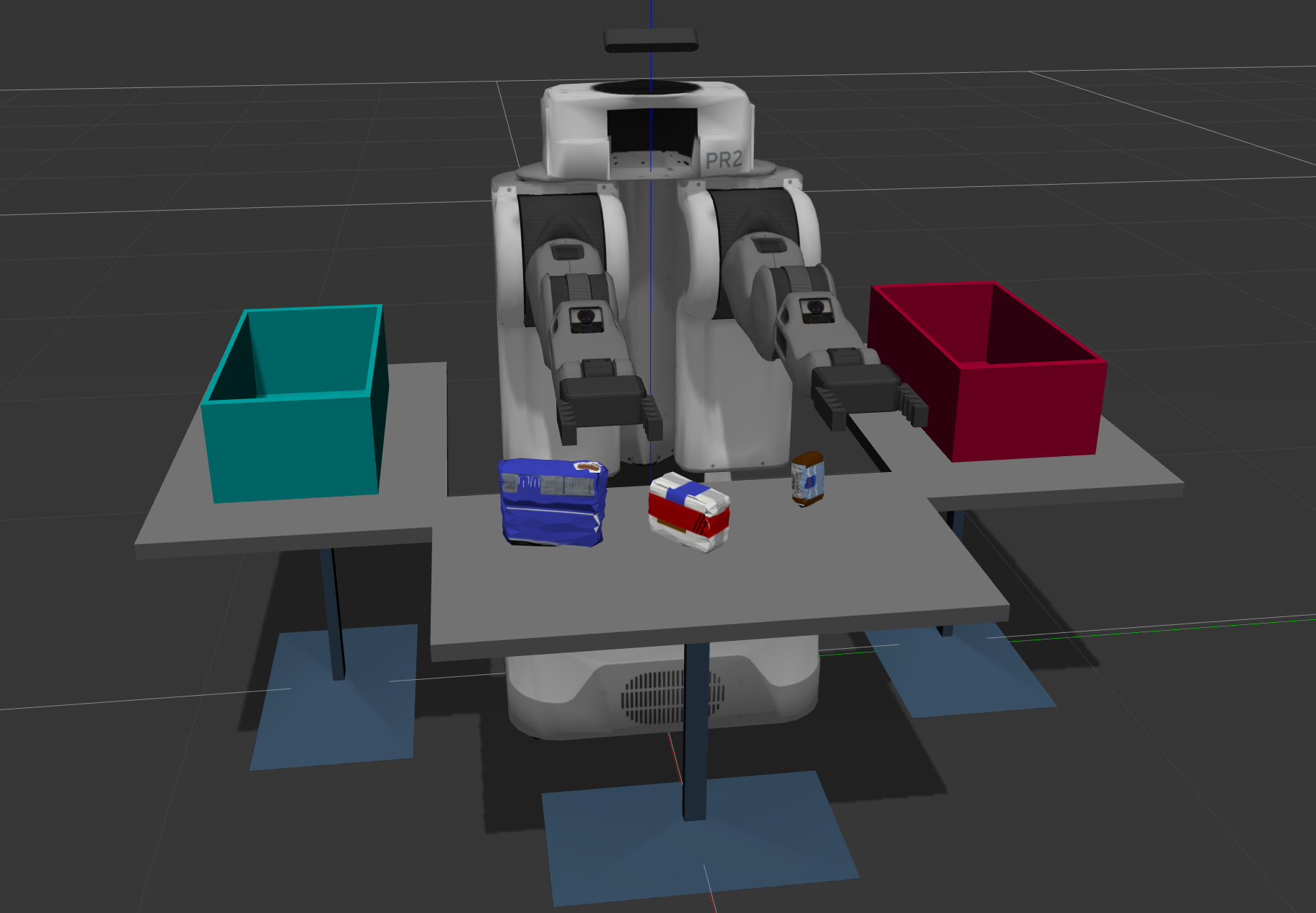
Given the cluttered tabletop scenario, I implemented a perception algorithm to identify target objects from a so-called “Pick-List” in that particular order, pick up those objects, and place them in corresponding dropboxes.
This project used Forward Kinematics to make the robot arm pick up a target object from the shelf in front of it then use Inverse Kinematics to drop it off at a bin next to it.
If you have any questions, comments, or concerns, let me know by filling out the form below.